
Link to the demo video!
Dual-camera-based Real-time Object Tracking for Mobile Manipulation Robots’ Pick and Place Task
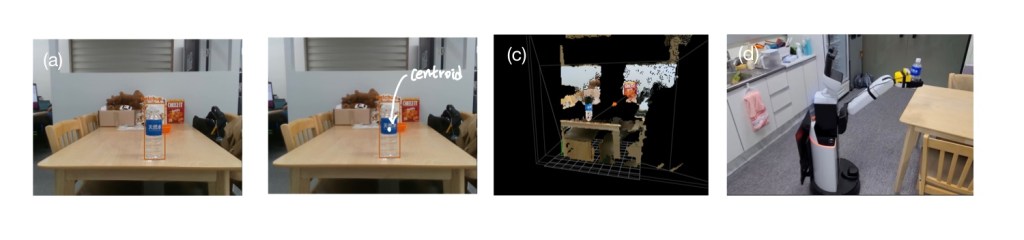
When a mobile manipulation robot performs a pick-and-place task using only a single camera, there are limitations in the field of view, making it difficult to accurately determine the distance and angle needed for grasping. To address this issue, this paper proposes a real-time object tracking method based on a dual-camera system that recognizes and grasps objects in real time. In the proposed method, the first camera is used to identify the type and approximate location of the object using a wide field of view, and the second camera is used to determine the precise location of the object. To validate the proposed method, pick-and-place experiments were conducted with objects placed in various positions. The results demonstrated improved task performance accuracy compared to using a single camera.
In this project, I…
Using Human-Support Robot (HSR), I proposed a way of using dual camera (one in the gripper and one in the head) model, instead of using a single camera for better accuracy. I fine-tuned YOLO algorithm for real time object detection, so that the HSR can perform the task in a everyday life environment.
How can I expand this idea?
I became interested in robots in every day setting (i.e., home environment, nursing homes, etc.). I would like to focus on Human-Robot Interaction, focusing on how robots can assist children with intellectual disability and older adults with dementia. How can robots assist people do their task better? How can it make special education more effective?
